事业领域
HOME
事业领域
机器视觉
3D机器人视觉
3D机器人视觉
3D机器人视觉
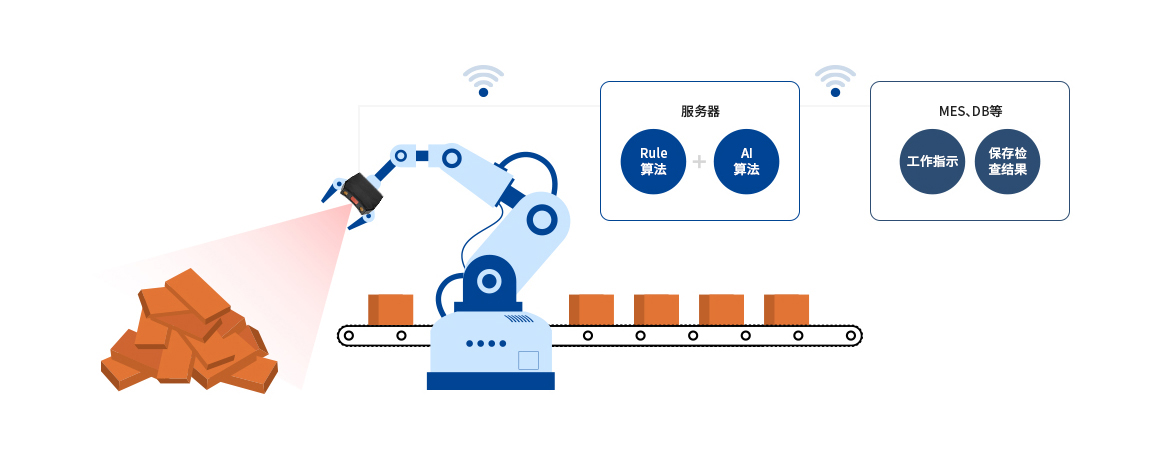
结合3D视觉与AI,实现机器人动作指导及Pick&Place
结合3D视觉与AI,实现机器人动作指导及Pick&Place
如果一个人把不断运进来的原材料捡起来放到生产线上,
简单的重复性的操作不仅会让人感到无聊,还会导致肌肉骨骼的损伤
但是,如果想要使用机器人的话,就有一个矛盾,那就是为了让机器人能够很好地捡起来,人就必须要先把材料整齐地摆好,不是吗?
给机器人装上3D视觉,给它安装上眼睛,用AI算法赋予智能,
机器人会自行识别材料,确定准确的位置和角度后,精准地拾取材料后并放在您想要的位置,
人们可以专注于更有创造力,且高附加值的工作。
甚至在picking的同时还可以检查材料不良。
现在,请把很难雇到人的材料loading / unloading业务交给TWIM 3D机器人视觉吧。
即使是周末和夜间的工作也能毫无怨言地完成。
如果一个人把不断运进来的原材料捡起来放到生产线上,
简单的重复性的操作不仅会让人感到无聊,还会导致肌肉骨骼的损伤
但是,如果想要使用机器人的话,就有一个矛盾,那就是为了让机器人能够很好地捡起来,人就必须要先把材料整齐地摆好,不是吗?
给机器人装上3D视觉,给它安装上眼睛,用AI算法赋予智能,
机器人会自行识别材料,确定准确的位置和角度后,精准地拾取材料后并放在您想要的位置,
人们可以专注于更有创造力,且高附加值的工作。
甚至在picking的同时还可以检查材料不良。
现在,请把很难雇到人的材料loading / unloading业务交给TWIM 3D机器人视觉吧。
即使是周末和夜间的工作也能毫无怨言地完成。
结合3D视觉与AI,实现机器人动作指导及Pick&Place 3D机器人视觉
概要
目前工业机器人只通过指示的工作路径移动。如果是需要通过视觉确认材料的位置或状态进行作业时,虽然只是单纯的工作,但还是要投入人力,进行着辛苦而虚无的重复工作。
(株)TWIM的3D机器人视觉团队将AI识别技术与3D传感器技术、3D数据处理技术、机器人运用技术相结合,推出机器人自己看、自己判断、自己移动的"3D视觉AI机器人控制"解决方案。
(株)TWIM的3D机器人视觉团队将AI识别技术与3D传感器技术、3D数据处理技术、机器人运用技术相结合,推出机器人自己看、自己判断、自己移动的"3D视觉AI机器人控制"解决方案。
特点
-
3D数据直接操控 + 用户特色算法
现有3D视觉的固定模式标准化算法仅在特定材料形状上表现出良好的性能,在形状、照明、特征多样的实际量产现场中,很多时候无法发挥在演示中展示的性能。TWIM 3D机器人视觉团队在raw data级别上直接操控3D数据,直接制作并应用最适合对象材料的算法,因此向用户证明了其能获得更准确的picking point和更快的算法速度。 -
从头开始编码
为了满足客户多样化的需求条件,必须灵活地与各种类型的PLC、MES、机器人连接,必须能适用最适合现场的操作程序,并应能够在各种例外情况下应对不同情况的具体场景。TWIM 3D机器人视觉团队从头开始,对包括通信、GUI、3D图形、算法、AI适用模块、传感器控制等所有部分直接编码,提供最适合客户公司现场的解决方案。 -
AI与Rule混合应用
在现场获得的2D及3D数据中交叉应用AI识别算法和基于Rule的识别算法,与AI单独或Rule单独算法相比,实现了更高的识别率。此外,通过对情况进行优化的识别和测量算法,确保了最佳的位置精度。 -
量产线应用比较
在搭载日本著名3D视觉的Robot picking system的性能低于预期的现场,去除相应的3D视觉,安装TWIM 3D Robot Vision Solution,通过表现出更高的识别率、更快的启动、获得更精密的picking point,反映出更多的顾客要求事项,并表现出更少的现场警报率,从而满足了客户公司的要求。
应用领域
-
Pick & Place
在加载工序中觉察到随机定位的材料的正确picking point后,将机器人移动到相应点进行picking的解决方案 -
Robot Guidance
在铆接、固定螺栓、点胶过程中,感知到随机放置的材料的正确位置和姿势后,将机器人移动到目标点,进行铆接、固定螺栓、点胶等工序的解决方案 -
3D检测
该解决方案使用激光扫描传感器获取精密的3D形状值后,执行顾客要求的检查及测量.